NOTE: All times in GMT (EST-5hrs; CET+1hr) and Earth Receive Time, when confirmation of the events is received on the ground. Events actually occur approximately 28 minutes, 20 seconds, earlier.
Nov. 12 at 0403 GMT:
Start of Philae’s Separation, Descent and Landing activities. This sequence includes heating of the lander batteries to separation temperature and activation of science instruments. The lander also turns on its separation motors and transitions to internal battery power in the last 20 minutes before release.
Nov. 12 at 0630 GMT
Rosetta conducts a “pre-delivery” maneuver to put the spacecraft in the correct position to release Philae.
Nov. 12 at ~0700 GMT:
The fourth and final Go/No Go decision point comes after confirmation of a satisfactory pre-delivery maneuver by Rosetta.
Nov. 12 at 0903 GMT:
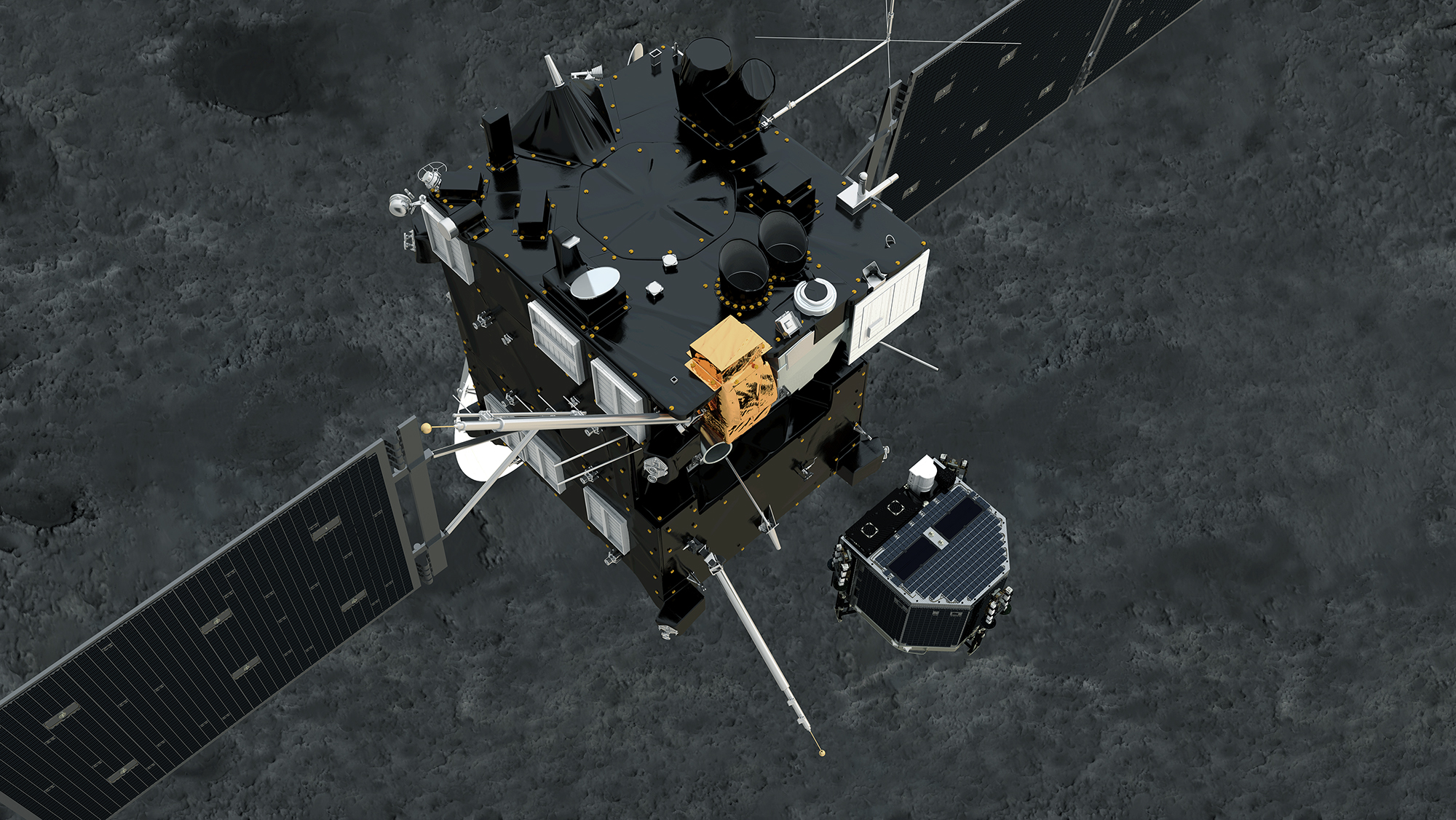
Three rotating screws nudge the Philae lander away from Rosetta at a velocity of about 20 centimeters per second, or 0.4 mph.
Nov. 12 from 0904-0947 GMT:
The Philae lander conducts its post-separation maneuvers, including taking images of the Rosetta orbiter with the CIVA camera payload, deployment of its three landing legs and magnetometer boom, and a 14-degree rotation of the probe’s main body relative to its legs to get into a stable orientation for touchdown.
Nov. 12 at 0943 GMT:
Rosetta performs its post-delivery maneuver to get into position to relay data from Philae back to Earth.
Nov. 12 at 1053 GMT:
Philae acquisition of signal from Rosetta. The two spacecraft establish communications and Philae begins downlinking data and images to the ground via Rosetta a few minutes later, including farewell shots it captured of the mothership during separation.
Nov. 12 at 1458-1517 GMT
Philae begins its pre-landing sequence. This phase includes the switch-on of the harpoon anchoring system to be fired at touchdown, preparation of the active descent system — a cold gas thruster used to stabilize the lander at touchdown — and the start of acquisition of images with Philae’s descent camera.
Nov. 12 at 1602 GMT (possible variability)
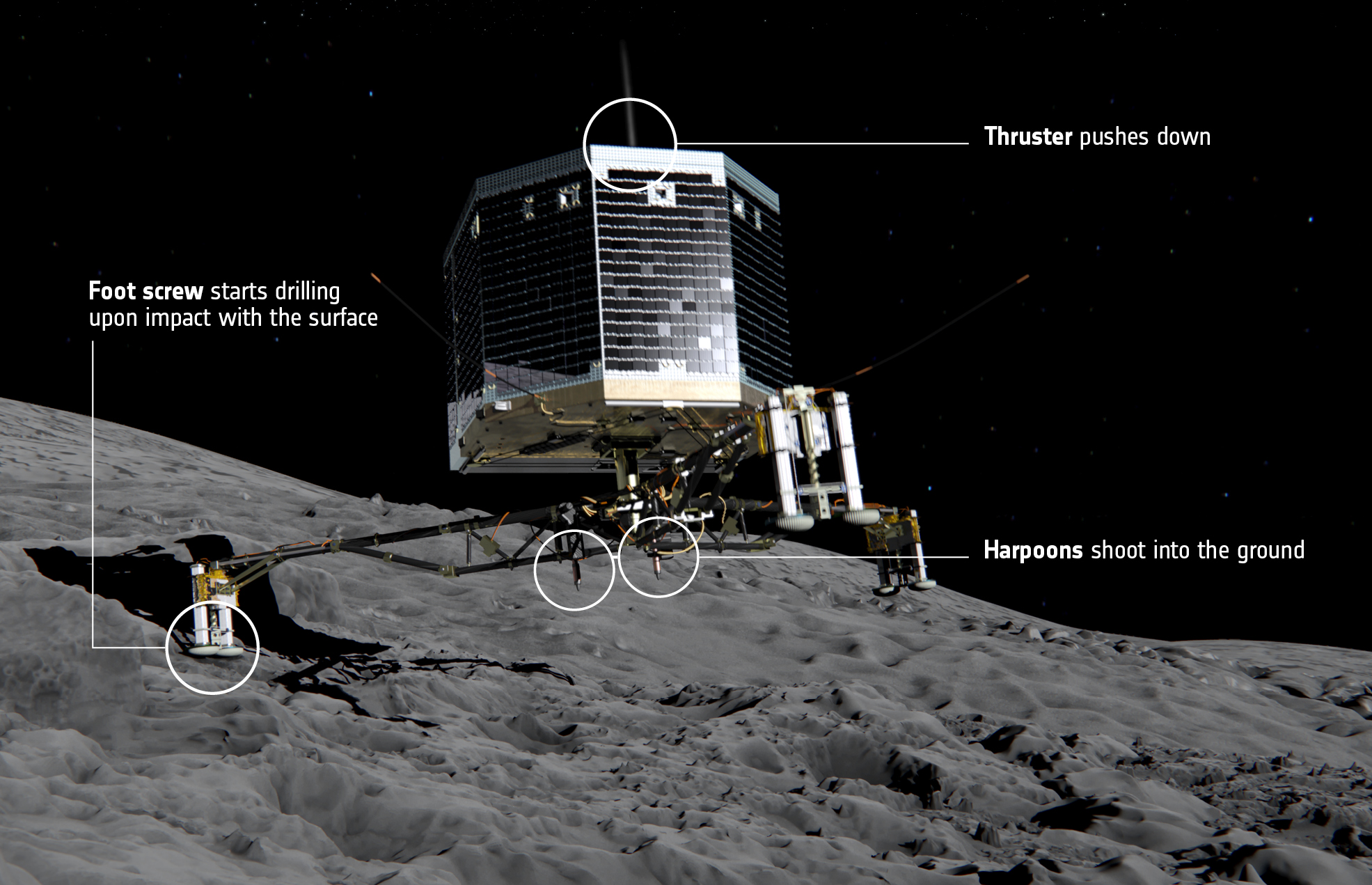
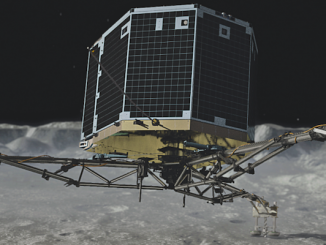
At the moment of touchdown on comet 67P/Churyumov–Gerasimenko, landing gear will absorb the forces of landing while ice screws in each of the probe’s feet and a harpoon system will lock Philae to the surface. At the same time, a thruster on top of the lander will push it down to counteract the impulse of the harpoon imparted in the opposite direction.
Nov. 12 at 1607 GMT (possible variability)
The lander begins an automated series of science observations, including panoramic imaging.
After making history as the first spacecraft to touch down on a comet, Europe’s Philae lander collected data on the rugged alien world’s environment and may have rebounded into space before settling back on the surface, scientists said Wednesday.
New readings from the European Space Agency’s Rosetta mission have challenged the theory that comets brought water to Earth in a series of cataclysmic collisions during the solar system’s chaotic youth.
On the eve of Philae’s landing, the European Space Agency has released its top ten images of comet 67P/Churyumov–Gerasimenko taken by Rosetta’s navigation camera from its lowest orbit just 10 kilometres from the centre of the nucleus.