|

|
|
||||
|
Preview of space shuttle Endeavour's STS-100 mission BY WILLIAM HARWOOD SPACEFLIGHT NOW Posted: April 16, 2001
Robert Cabana, manager of international operations for the station program, reiterated NASA's objections last week, saying he believed Tito should put off his visit until the next Soyuz taxi flight in October. That would allow more time for training, eliminate any interference during a very busy time in station assembly and give station managers more time to set up formal procedures and requirements for future space tourists. But Tito and the Russians have been adamament about launching on schedule, regardless of NASA's objections. "For somebody who's had as life long dream of flying in space, to delay for a few months and fly in October and be invited in to be part of the team and to train with us and to really make it a positive experience, I find it a little incredulous that he wasn't willing to accept that," Cabana said. "But that was his position and that's where it ended up." Cabana did not address the larger issue: NASA's apparent inability to prevent a space station partner - Russia - from acting unilaterally over the unanimous opposition of the program's other international partners. For their part, Usachev and his two NASA crewmates have said they will provide a warm welcome for Tito and his crewmates. But that is down the road. For Endeavour's crew, the focus is squarely on docking with the international space station and delivering its high-tech robot arm. The astronauts will not actually enter the station on docking day because the shuttle's cabin air pressure will have been lowered from 14.7 pounds per square inch to 10.2 psi Friday in preparation for the spacewalk Sunday to install the Canadarm 2 space crane. The astronauts will, however, place video and power cables in the PMA-2 docking port that will be recovered later by the station crew for use during the spacewalk Sunday.
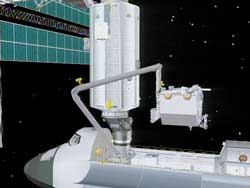
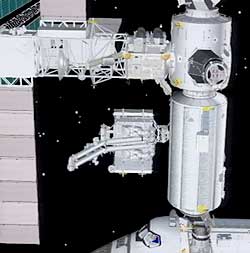
The new robot arm will be launched unpowered and the first item on the agenda for Hadfield and Parazynski will be to attach interim power cables. The arm later will receive power and relay telemetry through a so-called power and data grapple fixture, or PDGF, already in place on Destiny's hull. Unlike the shuttle's robot arm, which is attached to the orbiter at one end like a traditional crane, the SSRMS has no dedicated attachment point. Either end can be used to grasp a PDGF and eventually, the arm will be able to make its way from point to point along the station's external framework on its own, moving end over end like an inchworm from one PDGF to another. The new arm measures 58 feet long and weighs some 3,968 pounds. It has seven joints, is capable of rotating through 540 degrees and can move objects massing 255,736 pounds. Force sensors provide feedback to arm operators, giving them what amounts to a sense of touch. "The arm is probably a couple of generations evolved beyond the arm that is part of the space shuttle," Hadfield said during a pre-flight briefing. "The new one has a hand on both ends. Not really a hand, but the equivalent of a hand, the ability to grab and grapple. "That hand not only grabs on, but it also plugs in electrically and connects video and connects data when it grabs on, so the arm can be operated from either end. And the arm can move itself around the station as required so it can far exceed the reach the arm on the shuttle would have." The shuttle's robot arm, by comparison, is a fairly straightforward and well understood piece of hardware, Hadfield said. The new arm is much more capable - and complex.
"But there's a lot more capability in Canadarm 2 in that not only can it grab and plug in, but it has force sensors in it as well so I can feel what it is doing. But with added capability comes added complexity. And the computer interface for it is a two-person operation, one person flying and the other person running the systems. "Because it's a brand new system we are going to be extremely procedural and careful with that arm," Hadfield said. "We're going to move it agonizingly slowly at first, I think, until we get a feel whether or not it behaves like our simulators have predicted." After connecting power cables to the arm, Hadfield and Parazynski will unbolt eight so-called "superbolts" holding the folded space crane to the Spacelab Pallet. "The number one objective during spacewalk number one is to provide power to the arm so it can warm itself up," Hadfield said. 'So the first thing we have to do is hook up the wiring and then once it's warmed up for a little while, we will start undoing these enormous superbolts.
Lead spacewalk planner Jeff Patrick said Parazynski, his feet anchored in a foot restraint, "basically does a clean and jerk on the booms, raises the lower booms up so they're about at his head level." The boom joints will be bolted together with fasteners that work like concrete bolts, expanding internally as they are tightened to rigidly lock the arm members together. The arm will be left in that extended position overnight. Hadfield and Parazynski, meanwhile, will remove a new UHF space-to-space radio antenna from the shuttle's cargo bay and mount it near the forward end of the Destiny module before re-entering Endeavour's airlock. |
Status Summary See the Status Center for full play-by-play coverage. |