|
 |
|
||||
|
|
||||
|
The Mars Exploration Rover spacecraft FROM NASA PRESS KIT Posted: June 4, 2003
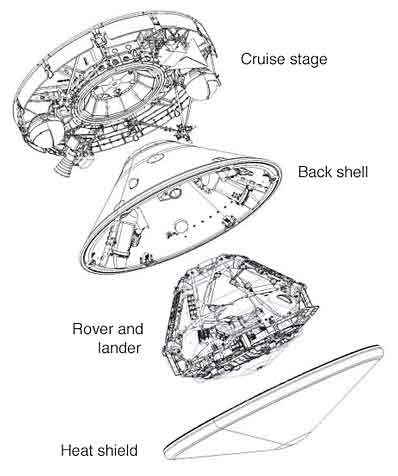
Cruise stage The propulsion system uses hydrazine propellant stored in two titanium tanks. Since the the entire spacecraft spins at about 2 rotations per minute, fuel in the tanks is pushed outward toward outlets and through fuel lines to two clusters of thrusters. Each cluster has four thrusters pointing in different directions. The star scanner and Sun sensor help the spacecraft determine its orientation. Since the rover's solar arrays are tucked away inside the aeroshell for the trip, the cruise stage needs its own for electrical energy. The arrays can generate more than 600 watts when the spacecraft is about as far from the Sun as Earth is, and about half that much when it nears Mars. The cruise stage also carries a system for carrying excess heat away from the rover's computer with a pumped freon loop and rim-mounted radiators.
Entry, Descent and Landing System The parachute is attached to the backshell and opens to about 15 meters (49 feet) in diameter. The parachute design was tested under simulated martian conditions in a large wind tunnel at NASA's Ames Research Center near Sunnyvale, Calif. The backshell carries a deceleration meter used to determine the right moment for deploying the parachute. Solid-fuel rockets mounted on the underside of the shell reduce vertical velocity and any excessive horizontal velocity just before landing. The airbags, based on Pathfinder's design, cushion the impact of the lander on the surface. Each of the four faces of the folded-up lander is equipped with an envelope of six airbags stitched together. Explosive gas generators rapidly inflate the airbags to a pressure of about 6900 Pascal (one pound per square inch). Each airbag has double bladders to support impact pressure and, to protect the bladders from sharp rocks, six layers of a special cloth woven from polymer fiber that is five times stronger than steel. The fiber material, Vectran, is used in the strings of archery bows and tennis racquets.
Lander The lander's basic structure is four triangular petals made of graphite-epoxy composite material. Three petals are each attached with a hinge to an edge of the central base petal. The rover stays fastened to the base petal during the flight and landing. When folded up, the lander's petals form a tetrahedral box around the stowed rover. Any of the petals could end up on the bottom when the airbag-cushioned bundle rolls to a stop after landing. Electric motors at the hinges have enough torque to push the lander open, righting the rover, if it lands on one of the side petals. Other motors retract the deflated airbags. An apron made out of the same type of tough fabric as the airbags stretches over ribs and cables connected to the petals, providing a surface that the rover can drive over to get off the lander. The side petals can also be adjusted up or down from the plane of the base petal to accommodate uneven terrain and improve the rover's path for driving off of the lander. Nearly 4 million people have a special connection to the Mars Exploration Rover project by having their names recorded on each mission's lander. Each of the two landers carries a digital versatile disc, or DVD, containing millions of names of people around the world collected during a "Send Your Name to Mars" campaign, which ended in November 2002.
Rover
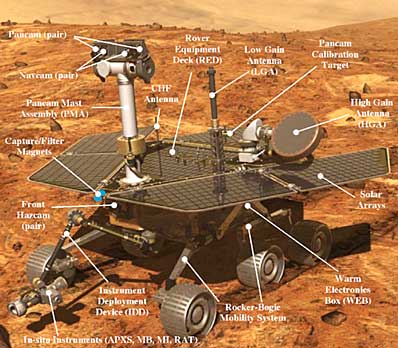
On each Mars Exploration Rover, the core structure is made of composite honeycomb material insulated with a high-tech material called aerogel. This core body, called the warm electronics box, is topped with a triangular surface called the rover equipment deck. The deck is populated with three antennas, a camera mast and a panel of solar cells. Additional solar panels are connected by hinges to the edges of the triangle. The solar panels fold up to fit inside the lander for the trip to Mars, and deploy to form a total area of 1.3 square meters (14 square feet) of three-layer photovoltaic cells. Each layer is of different materials: gallium indium phosphorus, gallium arsenide and germanium. The array can produce nearly 900 watt-hours of energy per martian day, or sol. However, by the end of the 90-sol mission, the energy generating capability is reduced to about 600 watt-hours per sol because of accumulating dust and the change in season. The solar array repeatedly recharges two lithium-ion batteries inside the warm electronics box. Doing sport utility vehicles one better, each rover is equipped with six-wheel drive. A rocker-bogie suspension system, which bends at its joints rather than using any springs, allows rolling over rocks bigger than the wheel diameter of 26 centimeters (10 inches). The distribution of mass on the vehicle is arranged so that the center of mass is near the pivot point of the rocker-bogie system. That enables the rover to tolerate a tilt of up to 45 degrees in any direction without overturning, although onboard computers are programmed to prevent tilts of more than 30 degrees. Independent steering of the front and rear wheels allows the rover to turn in place or drive in gradual arcs. The rover has navigation software and hazard-avoiding capabilities it can use to make its own way toward a destination identified to it in a daily set of commands. It can move at up to 5 centimeters (2 inches) per second on flat hard ground, but under automated control with hazard avoidance, it travels at an average speed about one-fifth of that. Two stereo pairs of hazard-identification cameras are mounted below the deck, one pair at the front of the rover and the other at the rear. Besides supporting automated navigation, the one on the front also provides imaging of what the rover's arm is doing. Two other stereo camera pairs sit high on a mast rising from the deck: the panoramic camera included as one of the science instruments, and a wider-angle, lower-resolution navigation camera pair. The mast also doubles as a periscope for another one of the science instruments, the miniature thermal emission spectrometer. The rest of the science instruments are at the end of an arm, called the "instrument deployment device," which tucks under the front of the rover while the vehicle is traveling. The arm extends forward when the rover is in position to examine a particular rock or patch of soil. Batteries and other components that are not designed to survive cold martian nights reside in the warm electronics box. Nighttime temperatures may fall as low as minus 105 C (minus 157 F). The batteries need to be kept above minus 20 C (minus 4 F) for when they are supplying power, and above 0 C (32 F) when being recharged. Heat inside the warm electronics box comes from a combination of electrical heaters, eight radioisotope heater units and heat given off by electronics components. Each radioisotope heater unit produces about one watt of heat and contains about 2.7 grams (0.1 ounce) of plutonium dioxide as a pellet about the size and shape of the eraser on the end of a standard pencil. Each pellet is encapsulated in a metal cladding of platinum-rhodium alloy and surrounded by multiple layers of carbon-graphite composite material, making the complete unit about the size and shape of a C-cell battery. This design of multiple protective layers has been tested extensively, and the heater units are expected to contain their plutonium dioxide under a wide range of launch and orbital-reentry accident conditions. Other spacecraft, including Mars Pathfinder's Sojourner rover, have used radioisotope heater units to keep electronic systems warm and working. The computer in each Mars Exploration Rover runs with a 32-bit Rad 6000 microprocessor,
a radiation-hardened version of the PowerPC chip used in some models of
Macintosh computers, operating at a speed of 20 million instructions per second.
Onboard memory includes 128 megabytes of random access memory, augmented by
256 megabytes of flash memory and smaller amounts of other non-volatile memory,
which allows the system to retain data even without power.
|
|
||||||
|
MISSION STATUS CENTER |
|||||||